Lendo sinais analógicos do Arduino com Python
Bueno, depois do Joel aterrorizar tanto que não iria dar tempo de concluir o projeto do robô até o FISL 16, ontem resolvi ver como funciona o tal do Arduino, que vai ser utilizado no projeto, para saber das reais dificuldades de implementar a coisa toda.
Na verdade o que me animou mais foi conhecer o Firmata, através do José, que possibilita que eu use, facilmente, o Arduino como uma extensão do meu computador, e o melhor ainda, permite que eu desenvolva todo o software necessário utilizando Python, com a lib pyFirmata.
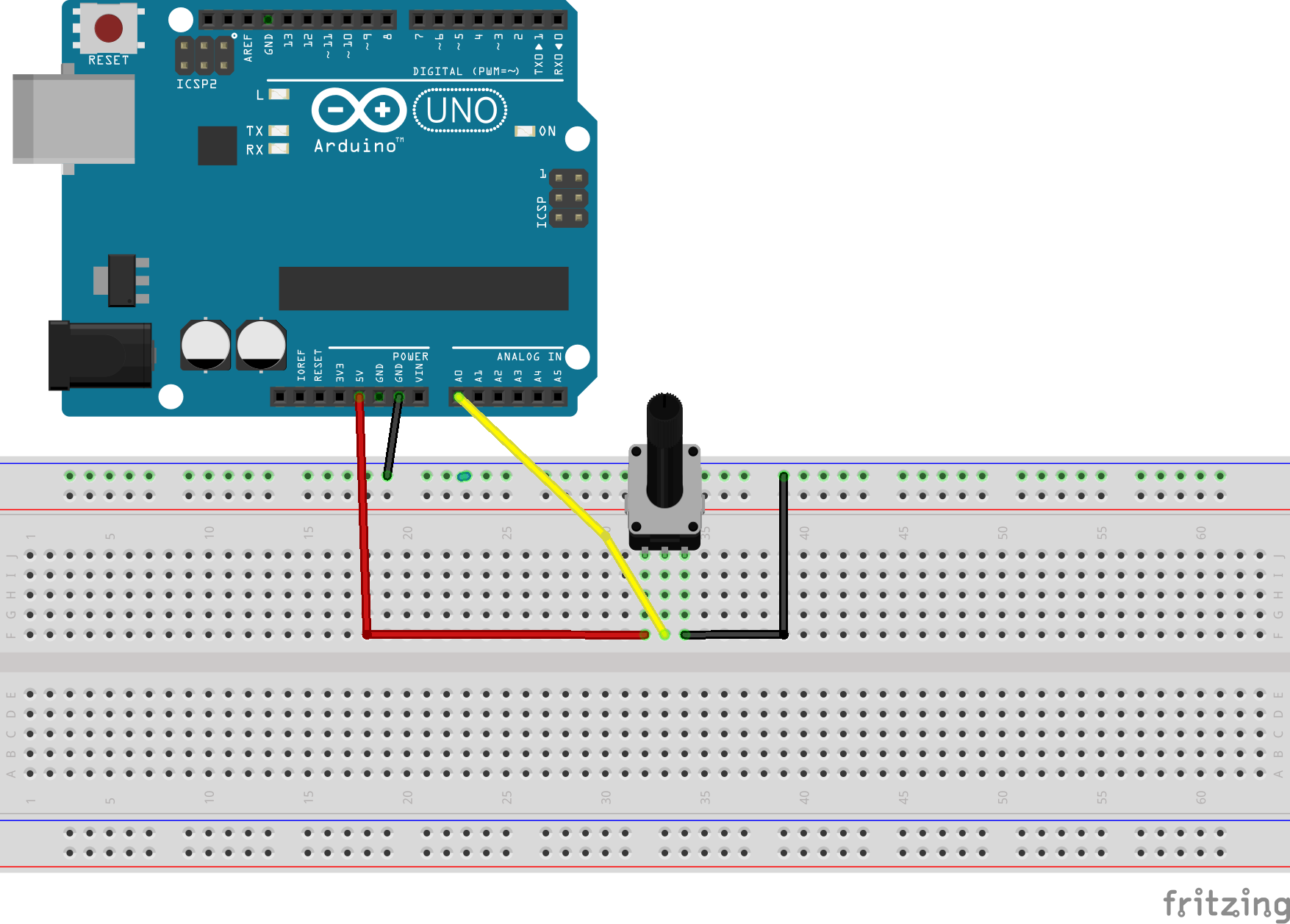
Para fazer o teste utilizei um arduino Uno e um potenciômetro de 10k.
Esse foi o código utilizado:
# -*- coding: utf-8 -*-
import time
from pyfirmata import Arduino, util
import sys, os
b = Arduino('/dev/ttyACM0')
pot = b.get_pin('a:0:i')
iterator = util.Iterator(b)
iterator.start()
while True:
val = pot.read()
cm = 'espeak -vpt-brf -p 100 -s 155 "O valor recebido é '+str(val)+'"'
time.sleep(2)
print str(val)
os.system(cm)
b.exit()
E ai a bagaça funcionando. A voz do robô está sendo sintetizada pelo Espeak, para quem usa a melhor distribuição linux do mundo, que não preciso dizer que é o Ubuntu, basta instalar via apt-get:
sudo apt-get install espeak